営業相談
その他お問合せ
お問合せ
machinesanyo
生産設備
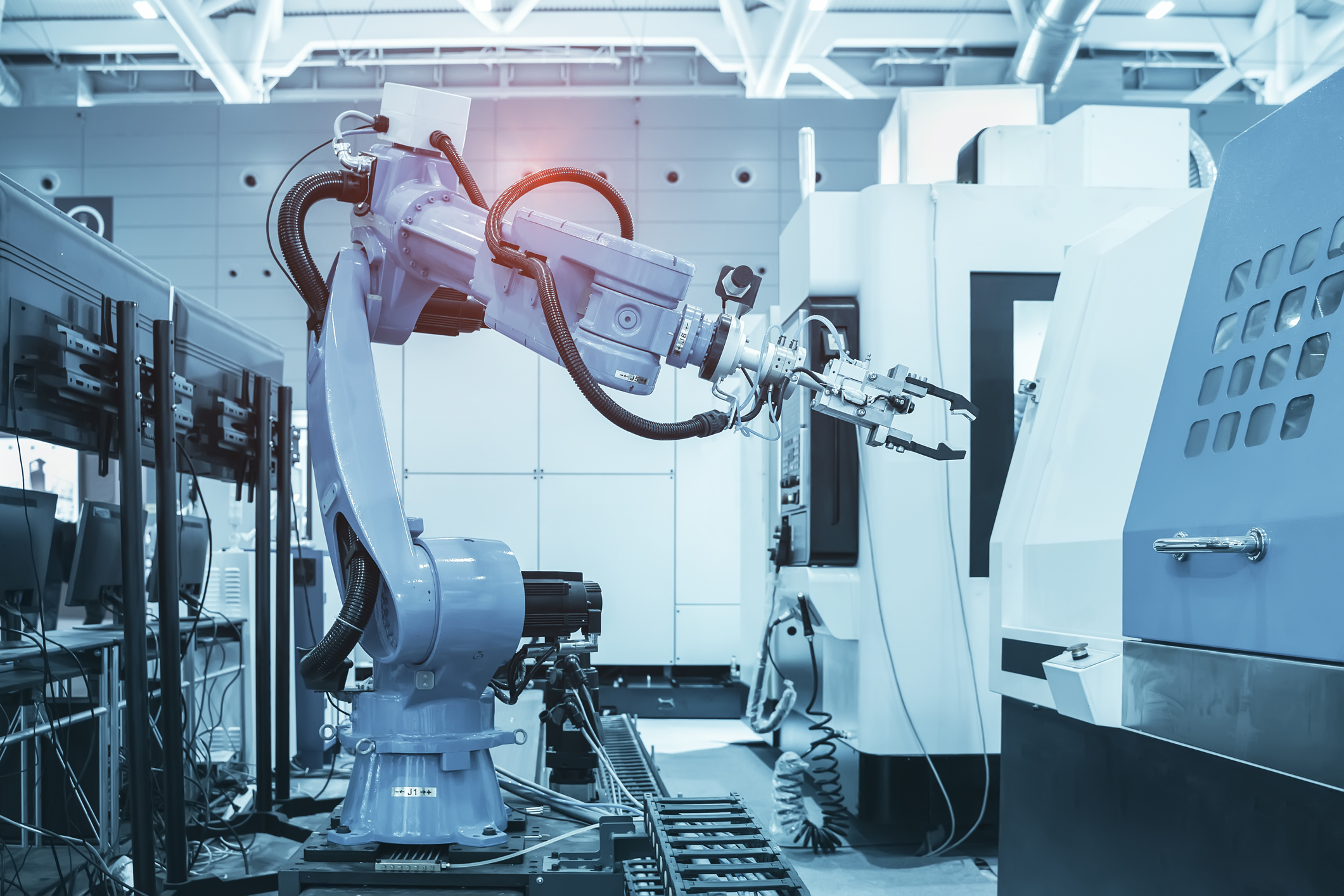
ロボットシステム
目的
/
部署
旋削加工機へワーク供給及び取り出しの省人化を検討されていました。
多関節ロボットにてワークをハンドリングし、NC旋盤と連動しパレット毎に供給・取り出しを実施しました。タクトタイムも向上しました。